

2. Alat dan Bahan
[Kembali]
A. Alat dan Bahan (Modul De Lorenzo)
1. Jumper

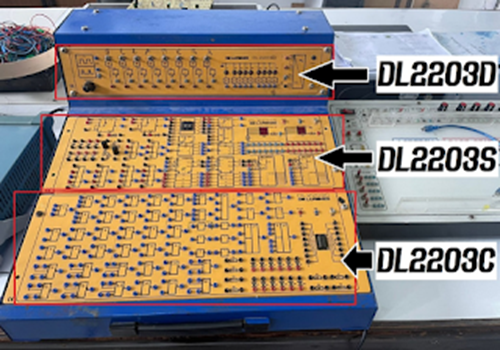
2. Panel DL 2203D
3. Panel DL 2203C
4. Panel DL 2203S

B. Alat dan Bahan (Proteus)

Jumper
2. Panel DL 2203D
3. Panel DL 2203C
4. Panel DL 2203S
Modul De Lorenzo
B. Alat dan Bahan (Proteus)
1. IC 74111

Flip-flop adalah rangkaian elektronika yang memilki dua kondisi stabil dan dapat digunakan untuk menyimpan informasi. Kelebihan JK Flip-flop adalah tidak adanya kondisi terlarang atau yang berarti di beri berapapun inputan asalkan terdapat clock maka akan terjadi perubahan pada keluarannya / outputnya. berikut adalah symbol dan tabel kebenaran dari JK Flip-Flop
2. Gerbang AND


3. Switch (SW-SPDT)

Gambar Switch
4. Logicprobe atau LED

Logic Probe


Pada rangkaian percobaan 1, digunakan 4 flip flop yang dirangkai pada modul de lorenzo, dimana disusun sebagai berikut.
- Pada Flip Flop 1, kaki S dihubungkan ke B6', kaki J dihubungkan ke Q flip flop kedua, kaki K dihubungkan ke Q' flip flop kedua, kaki C dihubungkan ke output gerbang AND, kaki R dihubungkan ke B0, dan untuk Q dihubungkan ke H7.
- Pada Flip Flop 2, kaki S dihubungkan ke B5', kaki J dihubungkan ke Q flip flop ke tiga, kaki K dihubungkan ke Q' flip flop ketiga, kaki C dihubungkan ke output gerbang AND, kaki R dihubungkan ke B0, dan kaki Q dihubungkan ke H6.
- Pada Flip Flop 3, kaki S dihubungkan ke B4', kaki J dihubungkan ke Q flip flop ke empat, kaki K dihubungkan ke Q' flip flop keempat, kaki C dihubungkan ke output gerbang AND, kaki R dihubungkan ke B0, dan kaki Q dihubungkan ke H5.
- Pada flip flop 4, kaki S dihubungkan ke B3', kaki J dihubungkan ke B1, kaki K dihubungkan ke B1', kaki C dihungkan ke output gerbang AND, kaki R dihubungkan ke B0, dan kaki Q dihubungkan ke H4. Sedangkan untuk input dari kaki AND sendiri dihubungkan pada B2 dan clk.
Setelah dilakukan percobaan, maka didaptkan hasil output pada maisng-masing kondisi pada jurnal, yaitu:
- Kondisi 1 bersifat SISO, karena inputan dan keluarannya mengalami pergeseran serta masuk dan keluar secara bergantian (satu per satu). Untuk
- Kondisi 2 bersifat SIPO, karena inputannya masuk secara bergantian (satu per satu), sedangkan untuk keluarannya keluar secara serentak.
- Kondisi 3 bersifat PISO, karena inputannya masuk secara serentak, sedangkan keluarannya keluar secara bergantiang (satu per satu).
- Kondisi 4 bersifat PIPO, karena inputan dan keluarannya masuk secara bersamaan (serentak).




Tidak ada komentar:
Posting Komentar